PoleMaster For 树莓派 是基于QHYCCD的跨平台SDK,以及POLEMASTER的QT跨平台版本开发的。
QHYCCD跨平台版本提供WINDOWS(X86,X64), LINUX(基于INTEL CPU和ARM CPU), MAC/OS, 安卓等主流操作系统的跨平台支持。能运行大部分QHYCCD相机。如果您希望使用QHYCCD自己开发软件,请访问开发者页面,获取QHYCCD SDK的库文件,DEMO程序等。
1.镜像烧写(为树莓派机器制作系统)
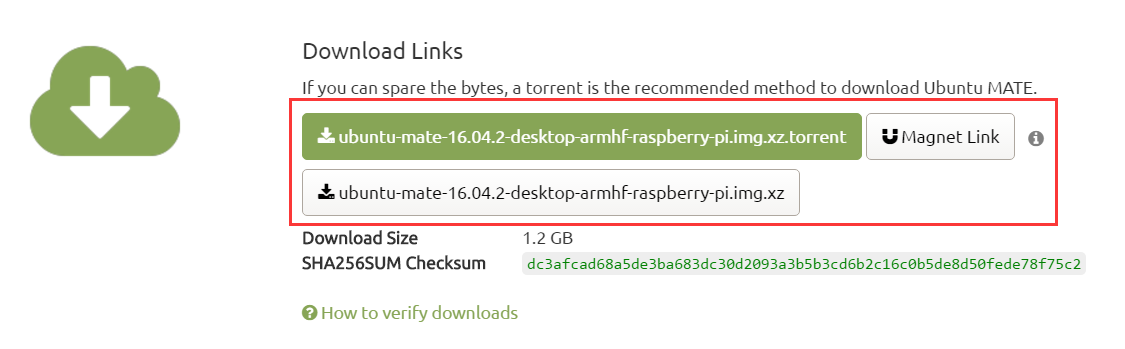
树莓派支持许多版本的系统,例如linux、raspberry pi、windows等。树莓派的启动方式是内存卡启动,启动时会自动加载烧写在内存卡中的内核及系统文件,建议使用16G及以上的内存卡进行镜像烧写。向内存卡烧写系统的步骤如下:
解压后:
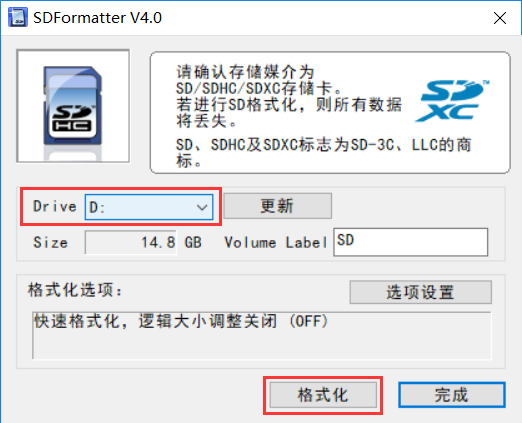
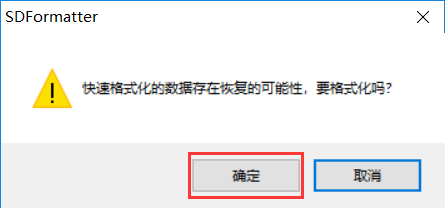
通常程序会自动选择内存卡设备,若未自动选择或选择错误,需要在Driver处选择正确的内存卡设备,点击格式化开始格式化内存卡,弹出的对话框选择确定;
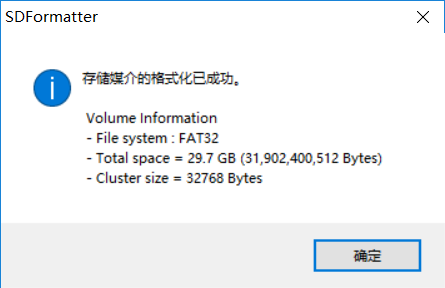
等待一段时间后,内存卡格式化成功;
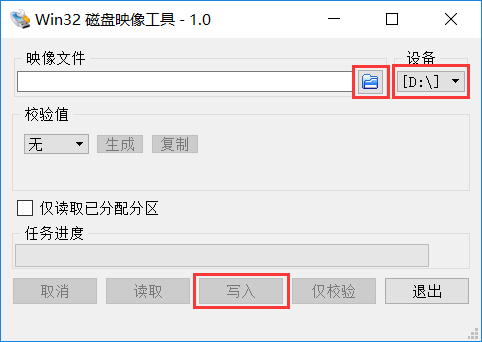
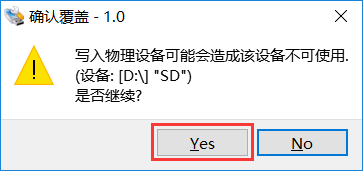
设备通常不用选择,若软件没有自动选择或选择错误需要手动选择,点击选择按钮,在弹出来的窗口选择刚才解压好的镜像文件,选好后点击写入开始烧写镜像弹出的对话框选择Yes;
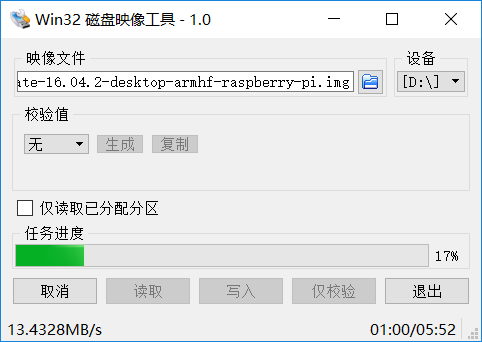
烧写过程中,软件会显示任务进度,等待几分钟后,镜像就烧写好了。
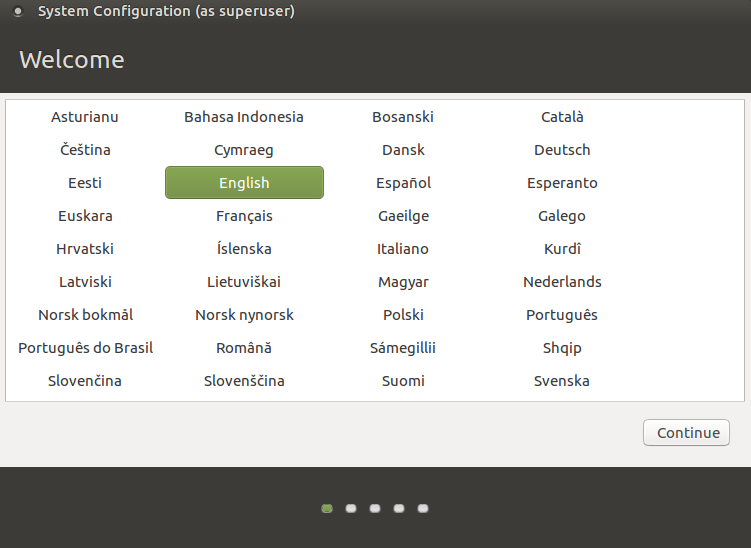
镜像烧写好后,连接鼠标、键盘、显示器和电源,上电后设备会自动运行并运行内存卡中的镜像系统,初次上电需要进行系统设置,如语言、WiFi、设备名称、开机密码等,系统配置成功后会自动进入系统界面。
设置语言:

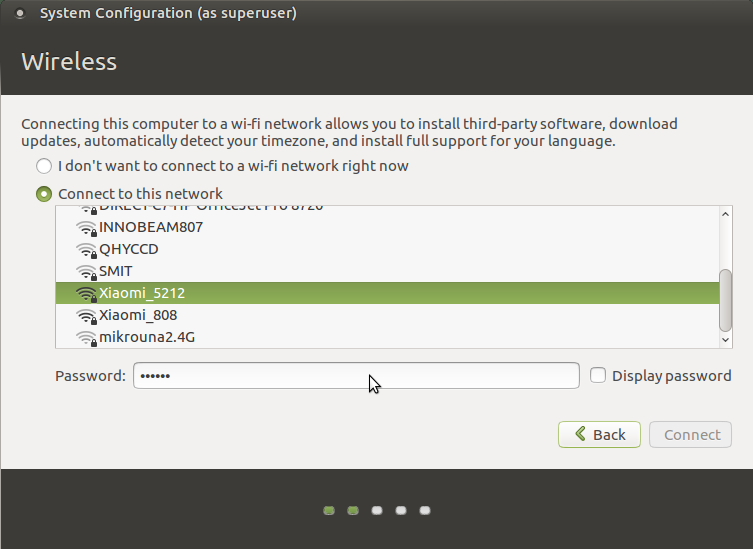
设置WiFi:
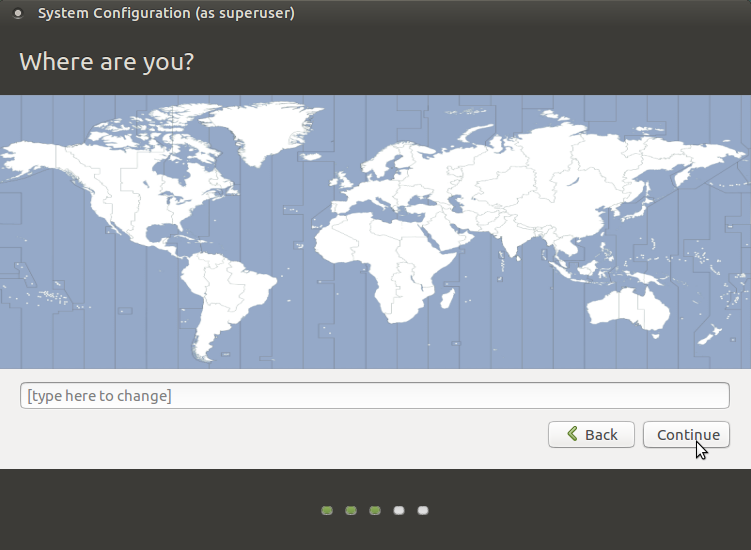
设置位置:
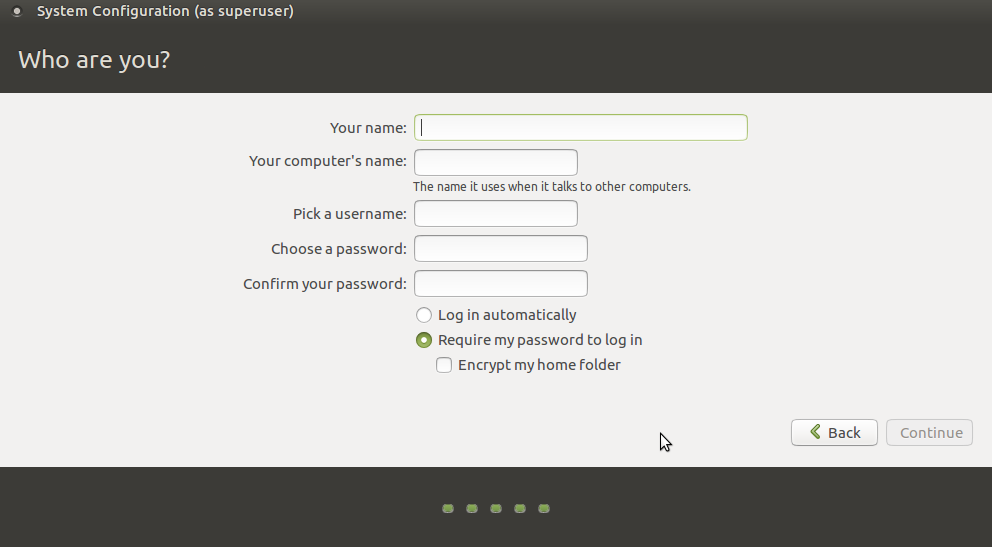
设置名称和开机密码:
设置好后会自动安装系统,中间会需要一点时间,耐心等待即可。
安装系统:
设置系统配置:
配置成功:
制作树莓派镜像的方法不唯一,其他方法也可以,不过要注意使用Ubuntu MATE版本的镜像文件制作,其他版本的镜像暂不支持。
下载并解压installer_sdk.tar.gz,进入installer_sdk目录下,运行installer.sh
$ cd installer_sdk
$ sudo ./installer.sh //未提示错误则安装成功
下载并解压PoleMaster PoleMaster_Qt-for-RPI-Ubuntu-1.3.5.0.deb.zip,使用dpkg命令安装,
$ sudo dpkg -i PoleMaster_Qt-for-RPI-Ubuntu-1.3.5.0.deb
安装好后进入/usr/bin/PoleMaster目录下,检查安装是否成功,及库文件的链接是否正确,
$ cd /usr/bin/PoleMaster
$ ldd PoleMaster //若未出现not found的库文件链接,则说明链接正确
添加命令行
修改.bashrc文件,在最后一行添加”export PATH=$PATH:/usr/bin/PoleMaster”,修改后,可以在任意位置使用”sudo PoleMaster”命令启动软件,若添加后使用sudo命令启动时仍提示”sudo: PoleMaster: command not found”,需要在后面再添加”alias sudo=’sudo env PATH=$PATH &>/dev/null'”
$ sudo nano ~/.bashrc
$ source ~/.bashrc //使修改生效
4.启动软件并连接相机
相机连接到设备后,输入lsusb,查看相机是否被树莓派设备识别且正确加载固件,若显示结果中可以发现1618 0941的设备,则说明相机已被识别并正确加载固件。
$ lsusb
启动PoleMaster
$ sudo PoleMaster //注意,启动PoleMaster时一定要以管理员权限启动,否则会导致无法识别相机,软件使用方法请参考用户手册